Important
Note that the sequence move and then kick or move and then catch has different results of kick and then move or catch and then move
As much you work on improving a bot, you may need to understand deeper details about the game behaviour. You do not need to know every single specification to create a great bot. So you probably do not read this document, unless your are developing a client (brainless bot).
This content is here, however, to give you answer in case you have questions.
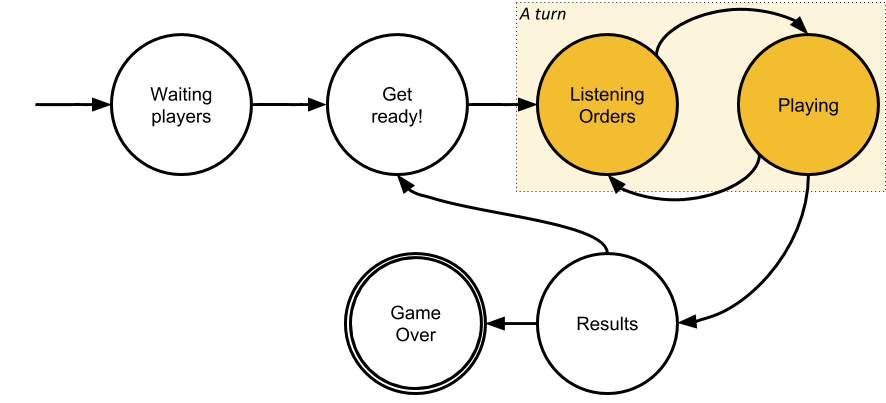
Differently of the traditional bot games where the server continuously listens for instructions sent by bots, Lugo defines the phase when all bots have a time window to send their instructions (called orders). That phase is called listening phase.
This format is designed to minimize possible the impact of network concurrency problems since the bots are not embedded to the server.
This format also avoid that bots get out of date game status due network latency.
The bots orders, however, are processed in the same sequence as the server got them. So, in in particular cases (e.g. catching or kicking the ball), there is an advantage for quicker responses.
| State | Description | What the bot should do? | Duration |
|---|---|---|---|
| waiting | The server is waiting for players. All player should connect to the server during this state. | Open the gRPC connection to the server. | Until both teams have all players connected. |
| get-ready | The server announces that everything is ready to start a new game cycle | Reset to its initial position | Irrelevant |
| listening | The server waits for players orders (described on Communication section) | Sending a message with a list of orders | 50ms (configurable) |
| playing | The server executes the orders in the same sequence they arrived | Sending a message with a list of orders | Irrelevant |
| results | The server announces a change in the score. | Nothing | Irrelevant |
| game-over | The server announces the end of the game. | Nothing | Permanently |
| pause | The server is on debug mode, and waiting for the next step signal | Nothing | Until the next step signal be sent |
The sequence of the actions taken during the Playing state has a huge impact on the game. You must know who it is to understand this state results:
Note that the sequence move and then kick or move and then catch has different results of kick and then move or catch and then move
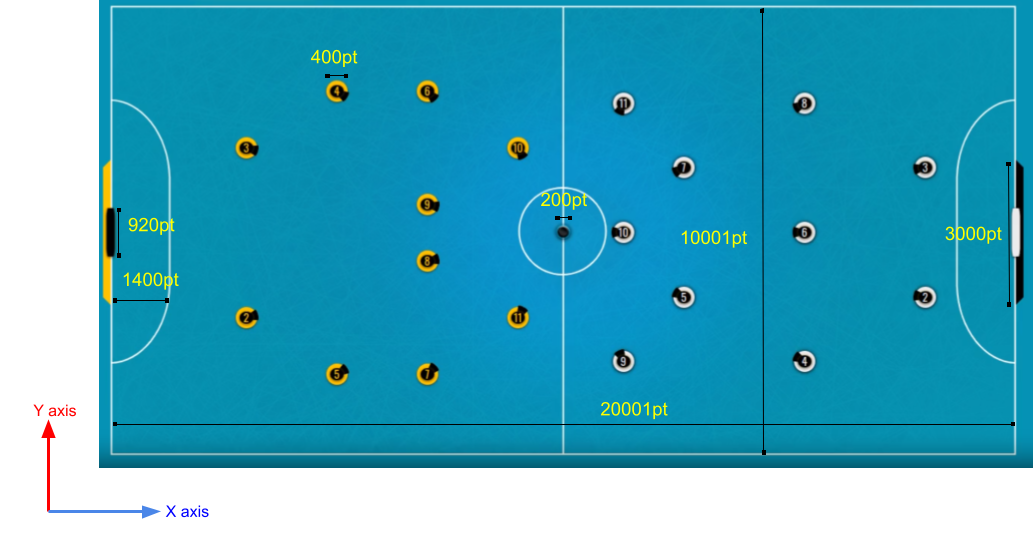
In this beta version, the frontend will not always draw the elements in their precise size.
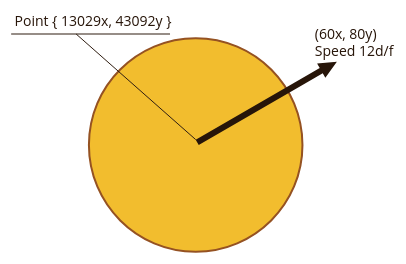
The ball and the players are elements in the field. All of them have:
There is no equivalent units for distance and time from the real world. So, we are adopting "d" for distance and "t" (turns) for time.
| Name | Value | Description |
|---|---|---|
| Field Width | 20001 d | Distance between the two goals. Coordinates from 0 to 20000. The line 10000 is neutral, which means it is neither in one team field nor in the other. |
| Field Height | 10001 d | Distance between the two lateral sides. Coordinates from 0 to 10000. |
| Ball size | 200 d | Ball diameter. |
| Ball max speed | 400 d/f | Max distance the ball travels during a turn. |
| Ball min speed | 2 d/f | Minimum speed to consider the ball in movement. |
| Ball deceleration | 10 d/f2 | Speed deceleration after by turn. |
| Ball max time in a goal zone | 15 f | Since a player cannot enter in the opponent goal zone, the ball cannot stay in there longer than 15 turns. |
| Goal width | 3000d | Distance between the two poles of the goal. |
| Goal zone range | 1400d | Minimum distance that an opponent player can stay from the goal. |
| Player size | 400 d | Player diameter (the player is considered a circle). |
| Player max speed | 100 d/f | Max distance the player travels during a turn. |
| Max goalkeeper's jump speed | 200 d/f | Max speed the goalkeeper may reach when jumps |
| Max goalkeeper's jump duration | 3 f | When the goalkeeper jumps, that movement will take 3 frames, and cannot be interrupted. |
| Game duration | 1200 turns | Number of turns (also called frames) during the game |
The communication protocol between the Game Server and the bots are define by protobuf files in Protos repository.
The player can only talk to the server. There are two moments when the player can (and should) talk to the server: at the beginning of the game when the connection is being opened, and during the Listening state.
During the Listening phase, the player must send the orders within the time window of this state (see the state duration on its specification). Otherwise the game will ignore that player during the next turn.
The bots must send Order Sets to the server during each turn.
Please see the Protos repository to find more details about that message format.
There are four types of orders that the bot may send to the server:
| Name | Action | Description |
|---|---|---|
| Move | Changes the player velocity (direction and speed). | If present, this order makes the player position be updated immediately after the order be executed. |
| Catch | Tries to catch the ball | The player must be touching the ball to catch it. Only the first catch order is executed by turn, which means that if there are two players touching the ball and both try to catch it, the first one to request will catch the ball. |
| Jump | Changes the goalkeepers velocity in a higher speed | The goalkeeper may move kicker than other players when they jump, however the jum movement cannot be interrupted after triggered. |
| Kick | Release the ball and changes its velocity (direction and speed) |
The kick is a sum of vectors. The current ball velocity is a vector (where the vector magnitude is the speed). Said that, keep in mind the the final direction will not be the same as the direction of the kick, unless the ball holder is stopped OR the kick is towards the same direction as the player movement.
|
There are three particularities in the goalkeeper behaviour: